Difference between revisions of "TOOLS OF THE TRADE ASSIGNMENT"
Jump to navigation
Jump to search
Remykonings (talk | contribs) |
Remykonings (talk | contribs) |
||
| Line 11: | Line 11: | ||
File:Kick off presentation.006.jpeg | File:Kick off presentation.006.jpeg | ||
</gallery> | </gallery> | ||
| + | <BR> | ||
<BR> | <BR> | ||
<BR> | <BR> | ||
| Line 22: | Line 23: | ||
<BR> | <BR> | ||
The connected servo motor then moves according to the amount of static energy of your hand. | The connected servo motor then moves according to the amount of static energy of your hand. | ||
| + | <BR> | ||
<BR> | <BR> | ||
<gallery widths=350px heights=500px perrow=4 caption="CAPACITIVE / SERVO MOTOR DEMO"> | <gallery widths=350px heights=500px perrow=4 caption="CAPACITIVE / SERVO MOTOR DEMO"> | ||
Revision as of 14:14, 22 November 2015
KICK OFF PRESENTATION
- HOW SOLID ARCHITECTURE CAN BE MORE DYNAMIC






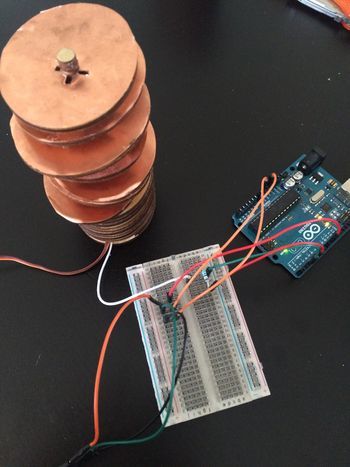
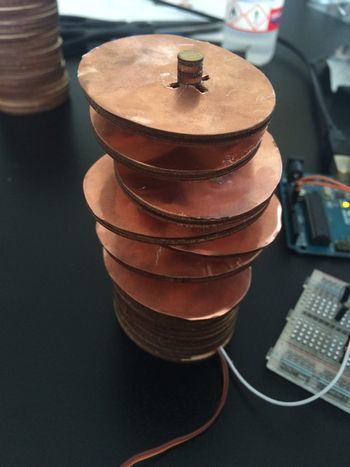
The capacitive sensor works due to the copper plates on top of all the blades.
This mesures the static energy of your hand when you wave over it.
The data then is being transfered to the arduino.
The arduino sketch sees the data and remaps that to fit the 1 to 180 degrees of the servo motor.
The connected servo motor then moves according to the amount of static energy of your hand.
- CAPACITIVE / SERVO MOTOR DEMO